

2018年6月3日下午2:30,华南理工大学建筑学院风景园林系主办的学术讲座在27号楼一楼多媒体室举行。本次学术讲座由建筑学院翁奕城老师主持,邀请了广州地理研究所的李晓军主任与孙彩歌博士等两位专家做报告。参加讲座的有华南理工大学建筑学院赵渺希教授、许自力、孙卫国、黄铎等老师,华南理工大学、华南农业大学的学生以及广州南园沙龙的各位嘉宾。
主题:基于Re-Localization SLAM算法的地下三维空间数据获取与应用
主讲人:李晓军(主任、副教授)
 讲座内容:
讲座内容:
1. 地下空间信息化的现状与需求
2. 地下空间三维数据采集的难点
3. SLAM系列解决方案
4. SLAM相关应用案例
重点讲解了SLAM概念和SLAM的应用
SLAM:可移动地下三维空间数据扫描系统
功能:移动扫描:数据采集效率提高数十倍和数据处理效率提高数十倍精准的无点云拼接:无拼接造成的碎步漂移、 将复杂的工程变成一场漫步, 无死角采集,不会错过任何一个细节。
同步定位与制图算法:机器人研究领域、通过对环境的判断,确认自己所在的位置
SLAMs用于测绘领域: 测图、遥感、定位
SLAM定位技术分类:点云、影像系统、同时用Lidar进行数据获取和定位、不再利用其他任何组件、使用SLAM算法确定系统位置
算法:解算高精度二维地图、基于平面位置计算三维点云,SLAM算法按传感器,分为激光SLAM和视觉SLAM,前者在机器人和无人驾驶上应用比较多,后者在VR领域比较多。
基于Re-localization SLAM 算法 的产品设计

SLAM主要应用案例:
石化石油管道项目测试总结:模型
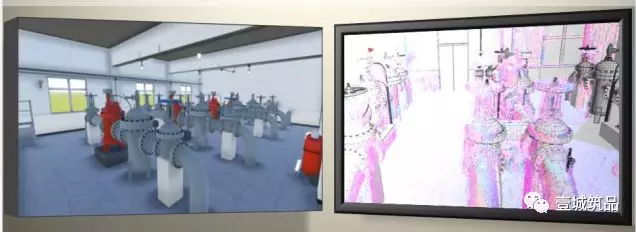
建筑与 BIM : Revit 模型

古村落古建筑保护应用

SLAM 产品应用


